|
Jiaxin Wei I am a third-year PhD student in the Smart Robotics Lab at the Technical University of Munich, supervised by Prof. Stefan Leutenegger. My research focuses on 3D vision, mapping, and object-level perception. I am also passionate about bridging the gap between the physical and virtual worlds. I earned my Master's degree from ShanghaiTech University, where I worked in the Mobile Perception Lab under the supervision of Prof. Laurent Kneip. |

|
Research |

|
GSFix3D: Diffusion-Guided Repair of Novel Views in Gaussian Splatting
Jiaxin Wei, Stefan Leutenegger, Simon Schaefer arXiv, 2025 project page / paper / video / code A flexible diffusion framework that removes artifacts and fills holes for novel views in 3DGS scenes. |
|
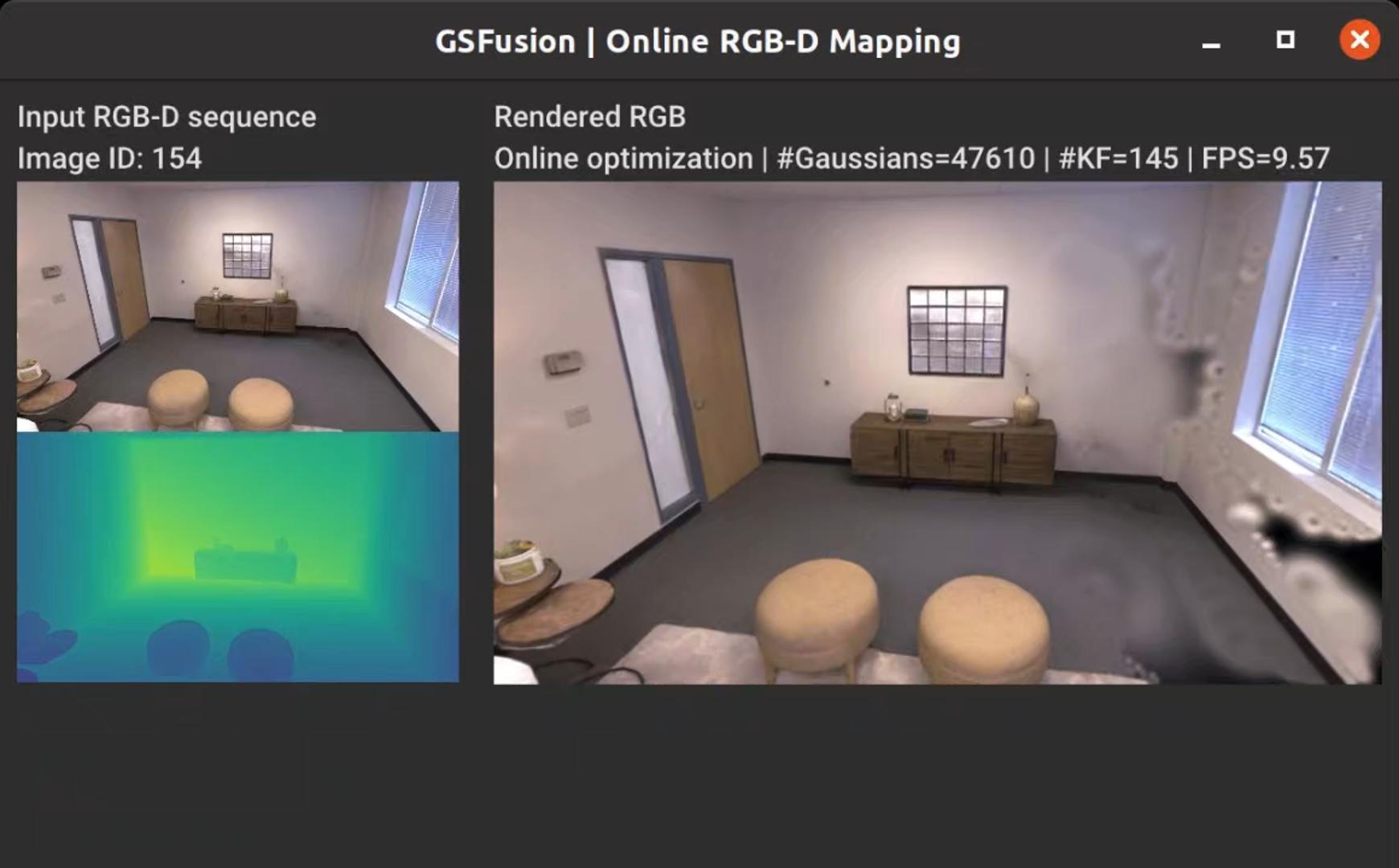
GSFusion: Online RGB-D Mapping Where Gaussian Splatting Meets TSDF Fusion
Jiaxin Wei, Stefan Leutenegger RA-L, 2024 project page / paper / code / video A real-time mapping system that simultaneously generates a TSDF grid and a photo-realistic 3D map for various downstream tasks. |
|
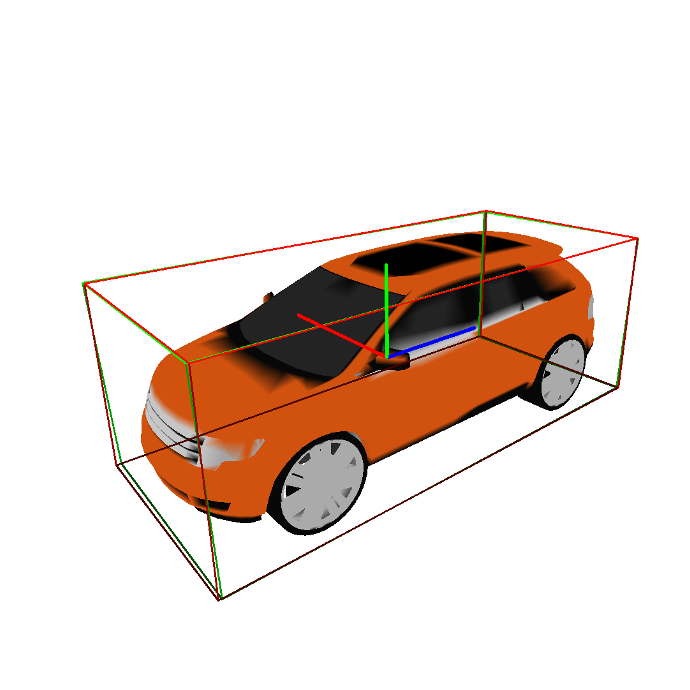
AEPnP: A Less-constrained EPnP Solver for Pose Estimation with Anisotropic Scaling
Jiaxin Wei, Stefan Leutenegger, Laurent Kneip ECCV Workshop, 2024 paper / code A novel extension of the classical PnP algorithm that estimates object pose without requiring exact 3D coordinates by handling unknown anisotropic scaling. |
|
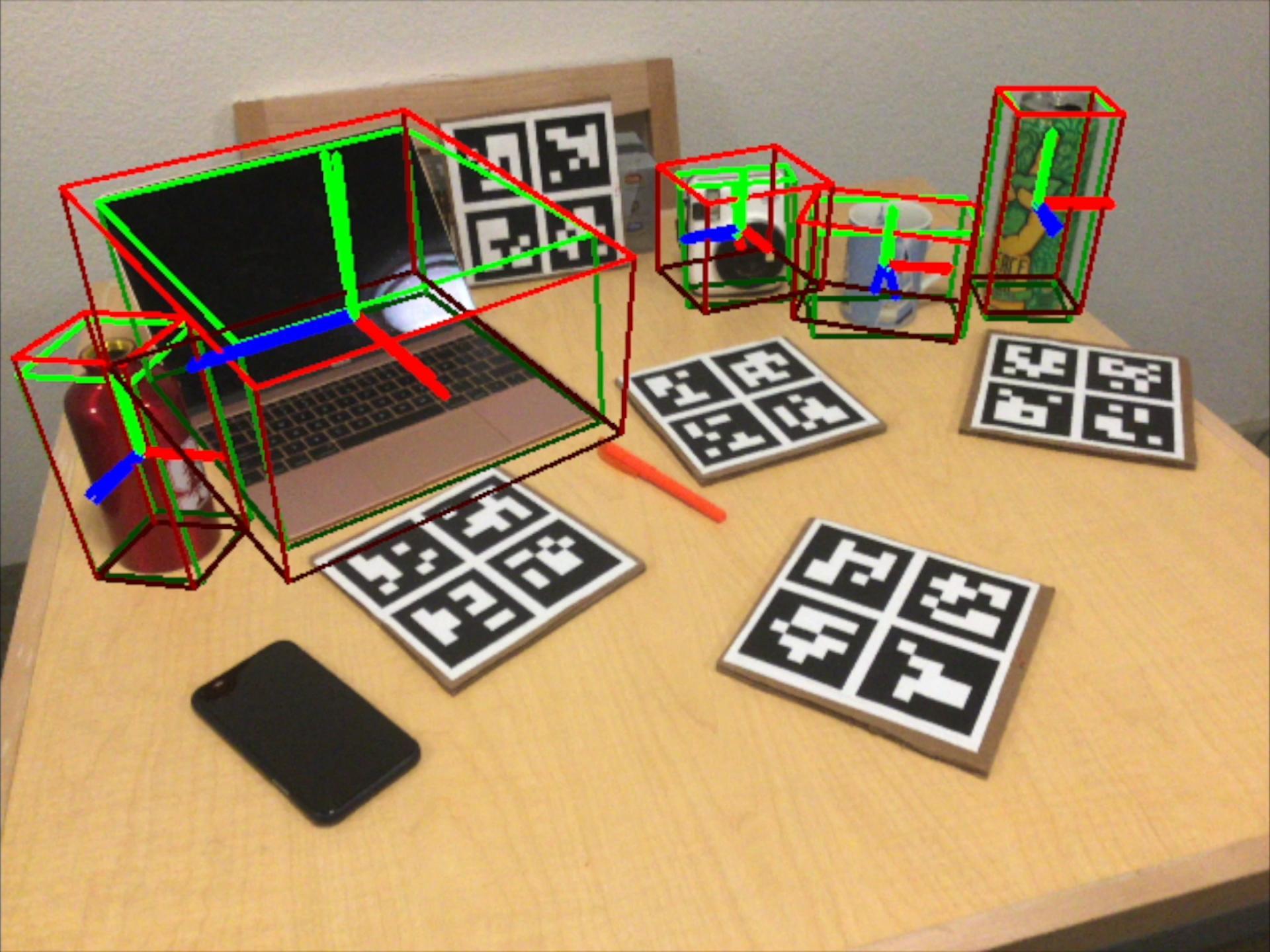
RGB-based Category-level Object Pose Estimation via Decoupled Metric Scale Recovery
Jiaxin Wei, Xibin Song, Weizhe Liu, Laurent Kneip, Hongdong Li, and Pan Ji ICRA, 2024 paper / code / video A decoupled pipeline for RGB-only object pose estimation that separately estimates metric size and 6D pose, achieving superior rotation accuracy. |
|
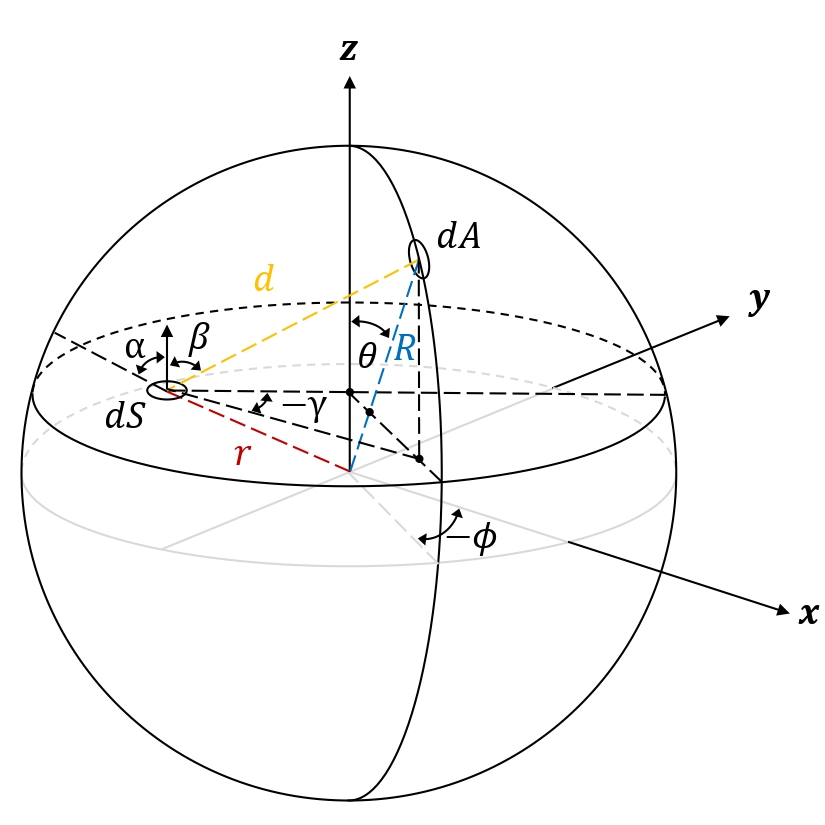
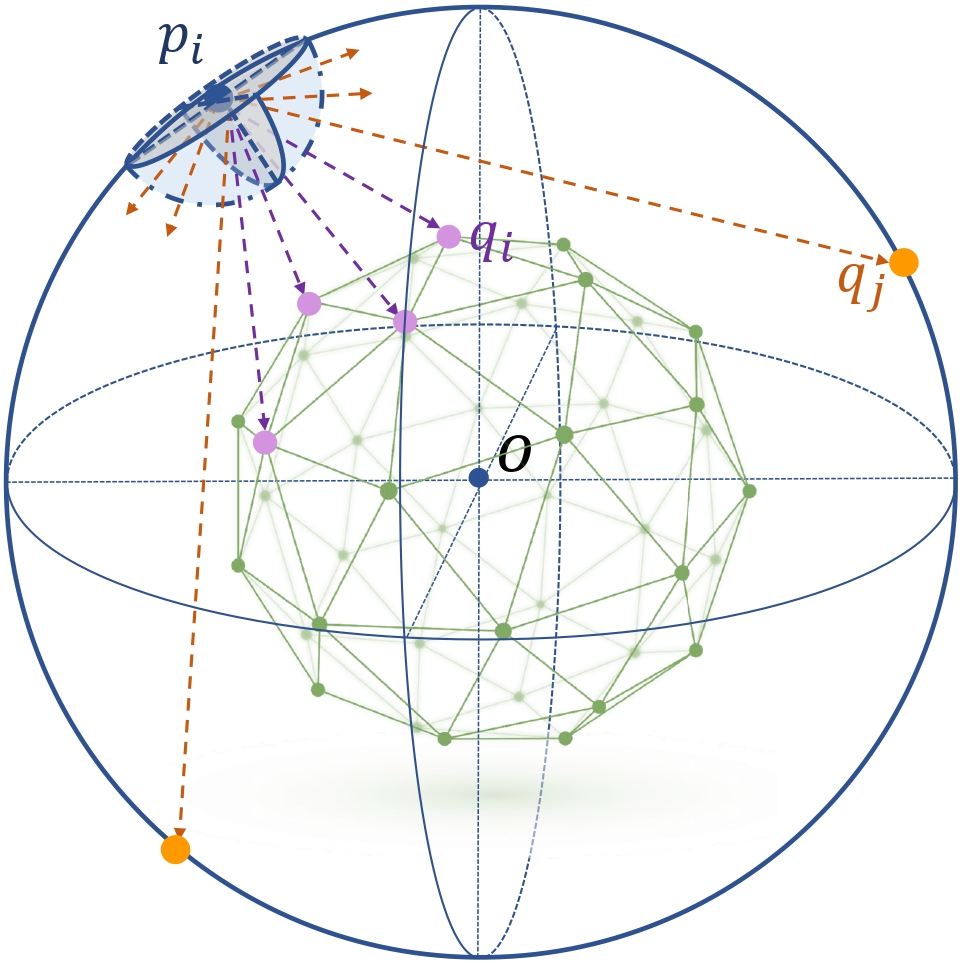
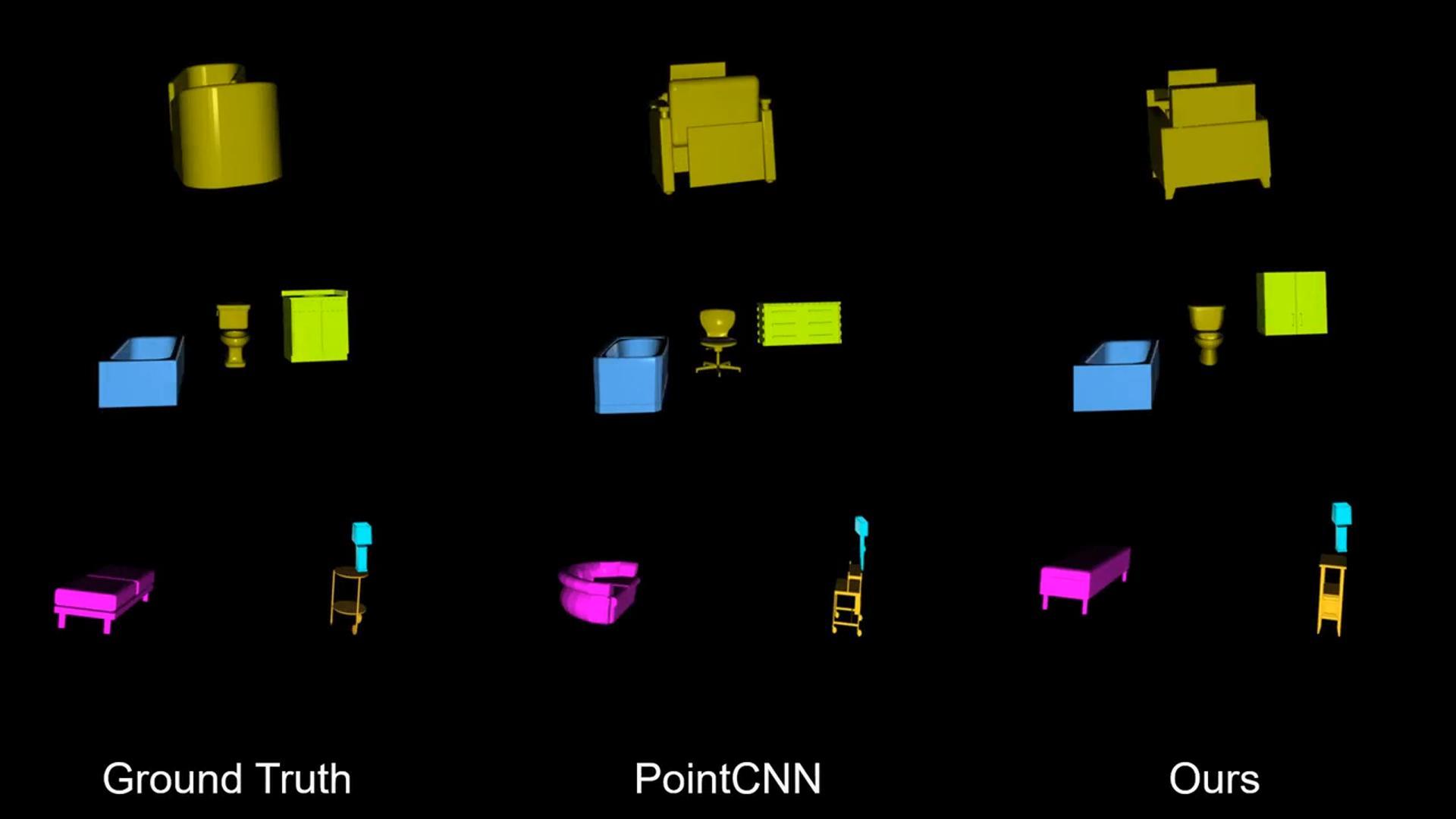
Spotlights: Probing Shapes from Spherical Viewpoints
Jiaxin Wei, Lige Liu, Ran Cheng, Wenqing Jiang, Minghao Xu, Xinyu Jiang, Tao Sun, Sören Schwertfeger, Laurent Kneip ACCV, 2022 paper A novel sampling model inspired by spherical multi-view scanners that enables compact and efficient point cloud representation for 3D shape completion. |
|
Accurate Instance-Level CAD Model Retrieval in a Large-Scale Database
Jiaxin Wei, Lan Hu, Chenyu Wang, Laurent Kneip IROS, 2022 paper / video A fine-grained CAD model retrieval in large-scale databases by combining learned shape descriptors with geometry-based re-ranking. |
|
Source code from Jon Barron's website. |